 合法的配资平台有哪些
合法的配资平台有哪些
蓄力助跑,仅凭一次尝试,星动纪元 L7 就以 95.641cm 的成绩,创下人形机器人跳高世界纪录。
171cm 的身高,65kg 的体重,即便是普通人也未必能蹦出来这么高、这么标准的超级玛丽跳。

尽管本届世界人形机器人运动会上不乏各类「翻车」名场面,吸引了不少眼球,不可忽视的是,无论是跑步、跳高还是跳远,这些项目都深度考验了机器人「算法+硬件」高度耦合的能力。
与此同时,在本届运动会中夺冠次数最多的宇树科技,其创始人王兴兴在世界机器人大会论坛上的发言,却因对当前热门的 VLA 路线提出质疑,而被不少人称为「炸裂发言」甚至「暴论」。
同样作为冠军团队的星动纪元,其创始人陈建宇却对 VLA 表达出与王兴兴不同的态度。
观点分野的背后,实则是两家公司对「如何让机器人变得更强大」这一目标,所采取的不同实践路径——一条是「硬件先行」,另一条是「软硬一体、垂直整合」。
1、垂直整合和硬件先行的观念分野
两位创始人的背景差异,在一定程度上预示了两家公司的不同发展方向。
王兴兴是典型的工程师思维,宇树科技也因此走上了「硬件先行」的道路;而陈建宇作为清华交叉信息研究院的教授,更具科学家视角,因此星动纪元选择了「软硬一体」的垂直整合路线。

双方最显著的观点差异在对「VLA 是否可行」的判断上。
陈建宇把 VLA 当作一个广义范式来理解,只要模型能把视觉、语言、行为整合并在物理世界执行就属于 VLA。
他认为,随着生成式世界模型与强化学习的加入,端到端方法的能力正在被逐步证明。
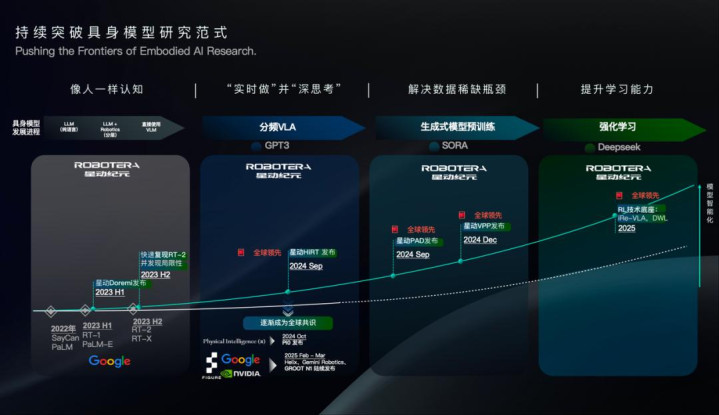
因此星动纪元持续投入于软硬一体、端到端 VLA、强化学习与世界模型的融合研发,并在去年发布了端到端原生机器人大模型 ERA-42。
王兴兴对当前机器人大火的 VLA 路线持怀疑态度,倾向于将更多资源投向「世界模型/视频驱动」路线。
他认为如果模型只是表面地把视觉、语言和行动拼接起来,却没有稳定的世界表示与预测能力,这样的系统在真实世界交互时会暴露出短板,例如对数据质量和多样性的过度依赖、对长期规划和因果推理能力不足等。
其次,在「模型-数据-硬件」的权重判断上,两家公司也有鲜明差异。
陈建宇坚持模型架构是第一位,但数据的多样性与质量、硬件设计同等关键,三者共同决定机器人的性能上限,因此星动纪元走的是软硬一体、同步推进的路线。
同时他也把如何用更少真机数据达到训练目标作为重要工程问题,并设计了数据金字塔与「预训练 + 真机微调」两阶段训练的策略。
王兴兴更强调模型决定数据,即要先把模型范式搞清楚,避免将过多资源浪费在无效的数据收集或硬件上。他觉得现阶段模型设计仍是瓶颈,模型能力不足会导致对数据量或数据种类的盲目追求。
同样,对于「开源和生态」,陈建宇和王兴兴的关注点也有些差异。
陈建宇重视开源生态能带来的协同作用,星动纪元有了仿人机器人强化学习框架 Humanoid Gym 及生成式大模型 VPP 等开源成果,认为开源能带动生态繁荣并受益于社区迭代。
王兴兴关注更多的是构建可复用的数据与模型资源,以及大规模分布式算力的工程实现,即更在意「如何让模型在多台机器人、多场景下可复制」。
最后是在商业化节奏上,两人对于短期落地的判断也有所不同。
陈建宇倾向于 B 端场景先行,逐步过渡到家庭场景的路径。他透露星动纪元已经在部分真实的工业场景进行部署,目前已经达到了 70% 多的人的效率,预计明年能达到 90% 左右。
这种选择背后是对技术成熟度和市场接受度的务实考量,同时也符合软硬一体技术的迭代需求。
王兴兴则采取了更加多元化的商业化策略。他毫不避讳地表示,宇树科技的机器人目前主要还是干表演、参加格斗比赛,因为眼下干实际工作的本事,确实还不到家。
这种选择是基于对技术发展阶段的清醒认知,既然机器人暂时还无法胜任复杂的实际工作,不如先在娱乐展示场景中积累技术、资金和市场关注,等待技术拐点的到来。
值得一提的是,两家在商业发展上也处在不同节点。
宇树离 IPO 只有临门一脚,需要一些「小步快跑」的策略维持经济性支撑,例如最近宇树发布了新品人形机器人 R1、四足机器狗 A2,同时也预告了一款全尺寸的人形机器人。
星动纪元则是在今年完整搭建起「人形机器人-服务机器人-灵巧手-机器人大模型」这样的全栈式体系。
2、区别于「宇树模式」的端到端闭环架构
区别于宇树的「硬件先行」路径,星动纪元走的是「软硬一体、端到端 VLA + 强化学习 + 世界模型融合」的路线。
宇树模式强调硬件自研的核心地位,通过提升关节电机扭矩、优化机械结构等方式为机器人身体奠定高性能基础。
而星动纪元则更倾向于将硬件与软件视作一个整体系统,认为唯有双向深度耦合,才能释放人形机器人在复杂环境中的最大潜能。
事实上,人形机器人的作业本质已经决定了软硬件耦合发展的需求。
人形机器人要在复杂、动态的现实环境中完成抓取、搬运、行走等任务,这些任务既依赖复杂的感知,也依赖高带宽的运动执行。
如果只专注「脑」或「身体」,都难以形成可落地的闭环,只有将「感知-决策-执行」的工程链路闭环并持续迭代,才能在复杂的真实世界中保持稳定表现。
其次,端到端的即时反馈与高频控制也具备显著优势。传统分阶段的「感知—规划—控制」架构存在阶段延迟与信息丢失情况,难以实现人类式的「看到马上做、实时修正」反馈回路。
端到端策略可以把「视觉-语言-动作」耦合在一个学习体中,使机器人在遇到突发干扰时能快速适配,尤其在需要高频、细粒度动作的任务中优势明显。
从商业化角度看,完全押注「先做大脑」的公司将面临漫长的交付周期;而采用软硬一体、并行推进的策略,则能通过客户与落地场景获取宝贵的数据与工程反馈,反哺模型迭代。
星动纪元目前已在国内 B 端市场实现落地,通过真实场景数据验证产品,形成技术闭环,从而兼顾研究进展与商业需求。

在将抽象理论转化为工程实践的过程中,星动纪元构建了自下而上共五个层级的技术系统:
硬件层包括自研关节模组、直驱电机、减速器、灵巧手等。以跳高冠军 L7 为例,其关节峰值扭矩、转速与自由度等参数均体现出高动态动作的设计取向。硬件自研不仅为实现高性能,也为获取更高质量、可重复的真机训练数据。
实时控制层包含了低延迟驱动、关节级高频控制器与动力学的在线求解模块。
星动纪元在这一层既使用传统控制理论的稳定性保障手段,也集成了强化学习,用于学习高维度运动策略。这种混合策略能在保证机器人在安全与稳定的运动前提下,扩展可学动作的上限。
感知与世界模型层融合了多模态感知例如视觉、触觉、深度等,并运行生成式的世界模型。目前星动纪元已经在尝试将生成式模型与世界模型结合,用于未来预测、认知与行为生成,即用模型去想象未来并据此产生动作。
协同端到端 VLA 大模型 ERA-42 与高层决策层则把视觉、语言和动作整合为端到端策略,覆盖从场景理解、任务解析到动作输出的闭环。
高层策略可借助预训练的视觉语言模型与生成式模块,再在真机上通过强化学习微调以实现任务特化。
数据工程与训练平台层包含仿真环境、数据标注及分布式训练集群。这些层级连成链条,形成了从硬件到模型、从仿真到真机、从开源到商业场景的「闭环加速器」。

而在这一体系的支持下,星动纪元已收获了阶段性工程成果:
L7 跳高夺冠,是其在「动力学设计、关节控制、算法整合」工程能力的实证。
灵巧手已进入稳定量产阶段,成本与稳定性显著优化,与 VLA 控制整合实现手指高频细粒度控制,从实验室样机迈向了工业级产品。
发表运控强化学习、世界模型融合与生成式 VLA 相关论文,开源 Humanoid Gym 与 VPP 等项目,推动行业协作。
在仓储搬运、巡检、文娱演示等工业场景完成商业化验证,今年已累计交付超 300 台产品,另有上百订单在量产中,全球市值前十的科技公司中有 9 家为其客户。
星动纪元的闭环体系及其成果,展示了技术落地的一种可能。而这也恰恰是当前行业「百家争鸣」的一个缩影。
而将视野从一家公司的实践拉升至整个行业,不难发现,在陈建宇与王兴兴看似迥异的选择背后,映射出的正是整个行业对于人形机器人未来的共同信仰。
3、分歧背后更多的是对行业的共同信仰
尽管陈建宇与王兴兴在技术路径和商业策略上存在明显差异,但在一些根本性问题上,二人有着高度共识。
他们都相信人形机器人是 AI 技术的终极载体之一,能够影响人类社会生产和生活方式。
王兴兴预测,人形机器人的「ChatGPT 时刻」正在临近,快则一两年,慢则三五年,届时机器人将能够在一个完全陌生的环境中,听懂各种复杂指令并顺利执行。
陈建宇也认同从机器工人到家庭伙伴的渐进式发展路径,认为「最终杀手级的应用,一定是在家庭里面」。
他们对技术本质的理解也有异曲同工之处,即具身智能的本质是「感知-决策-执行」的闭环,而非简单的软件或硬件突破。
王兴兴认为机器人最重要的还是 AI,而不是机器人的本体,但这并不意味着硬件不重要,而是指智能水平已成为当前的主要瓶颈。
陈建宇则通过软硬一体的实践,证明了硬件性能边界对智能能力的关键制约,只有足够灵活的手才能执行复杂的操作任务,只有足够强大的运动能力才能支持广泛的工作范围。
在软硬协同的重要性上,两人更是不谋而合。陈建宇虽然强调软件的主导性,但始终承认硬件性能决定了模型的发挥上限;王兴兴虽坚守硬件先行,却也在积极引入大模型提升机器人的自主决策能力。
这些共识背后,是行业对「机器人是系统工程」的共同认知,没有强大的模型,硬件只是一堆精密的机械;没有可靠的硬件,模型只能是实验室里的算法。

从当前的技术现状到理想的通用具身智能,人形机器人行业仍需跨越多个发展阶坎。通过陈建宇和王兴兴的观点,或许可以勾勒出行业未来发展的可能路径:
短期(1-3 年):端到端 VLA、世界模型、视频生成等不同技术路径将并行迭代、相互借鉴融合;领先企业将在特定工业场景实现小批量落地,验证商业化可行性
中期(3-5 年):可能迎来「ChatGPT 时刻」,技术突破提升通用能力,行业逐渐形成统一技术标准,应用场景从工业扩展到物流、医疗、零售等多个商业领域
长期(5-10 年):有望进入家庭成为「家庭伙伴」,但需解决安全性、可靠性、交互自然性等问题,技术也需持续突破迭代
事实上,陈建宇已经将世界模型视为 VLA 范式下的一个重要演进方向,而王兴兴也并不完全否定端到端方法的价值。
未来,多元技术路径也可能在行业发展过程中逐渐融合。端到端 VLA 模型可会吸收世界模型的预测和推理能力,提高在陌生环境中的表现;世界模型也可能借鉴 VLA 的架构设计,提升实时交互能力。
世界上没有两片完全相同的树叶,在这场具身智能竞争中没有一家企业在战术、范式和工程焦点完全一致。
在范式尚未完全收敛的当下,分歧越多,越可能引导行业找到通向正确结果的「捷径」。
当实践检验与范式反思并行的同时彼此验证,行业才能既快速落地,又不会过早陷入技术僵化。
从技术积累到产业化,从赛场的一次冠军到变成家里一个可靠的助理,这个过程必然是长期且充满不确定的。
未来几年或许会是最具戏剧性也最关键的阶段。只有在不断反思底层范式的同时,把「技术-商业」闭环跑通合法的配资平台有哪些,二者合力才能让人形机器人变成可持续的生产力。
启灯网提示:文章来自网络,不代表本站观点。
相关文章



热点资讯





推荐资讯